I followed the Isaac Sim ROS2 camera tutorial, and I can confirm that a ROS2 topic is being published. However, the image I receive is not from the RealSense camera attached to my robot. Instead, it shows the simulator’s perspective viewport, and the output keeps flickering.
What could be causing this issue, and how can I make sure the ROS2 Camera Helper publishes from the robot’s RealSense camera with the correct field of view instead of the perspective view?
(Since this was written with GPT, the translation might not be accurate)
Hello, My RGB camera stream appears correctly in RViz, but the depth camera only shows a black screen. What could be causing this issue? Could you suggest what settings or topics I should check to debug this? I want to connect a RealSense camera and use it in my setup. Is it possible that Camera_Pseudo_Depth is of type Camera, but only named as a depth camera, and in reality it is just an RGB stream, meaning I need to compute the depth myself?
how can I make sure the ROS2 Camera Helper publishes from the robot’s RealSense camera with the correct field of view instead of the perspective view?
You can use visualization tool Rviz to visualize the published images from ROS2 Camera Helper and check if it aligns with RealSense camera.
but the depth camera only shows a black screen
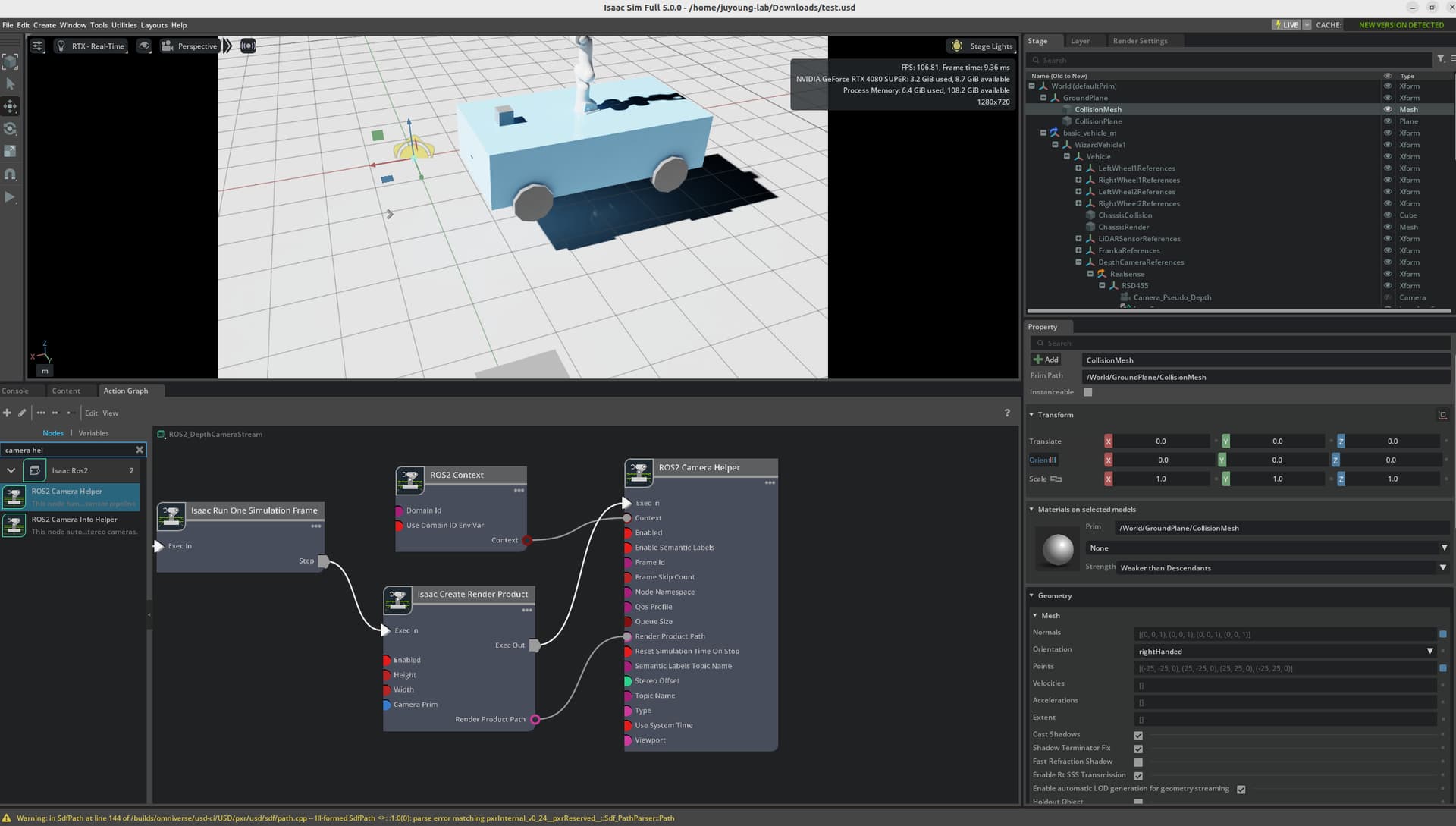
Can you try ros2 topic hz <depth_topic_name> to check if there is anything published? What does your action graph look like? Do you have a node publishing depth images?
The materials shared by @Simplychenable would be very helpful (thanks!).
Let me know if you have more questions or issues.
We noticed that this topic hasn’t received any recent responses, so we are closing it for now to help keep the forum organized.
If you’re still experiencing this issue or have additional questions, please feel free to create a new topic with updated details. When doing so, we recommend mentioning or linking to this original topic in your new post—this helps provide context and makes it easier for others to assist you.
Thank you for being part of the NVIDIA Isaac Sim community.