I’m following this tutorial Course | NVIDIA from Getting Started: Simulating Your First Robot in Isaac Sim. It asks me to install ROS2.
Do I need to install Ubuntu to run ROS2 and complete the following exercises or can I install ROS2 on pure windows 11?
If only the former is possible, is there a tutorial that is better suited for beginners with no experience with Linux, Ubunto or ROS? I’m having a hardtime understanding what I need to do just by refering to Nvidia’s or ROS documentation.
I’m uncertain if the course is associated with Ubuntu and a specific version of Isaac Sim. If it is not, you can refer to the current version (4.5.0) documentation for guidance on installing ROS2 on Windows: ROS and ROS 2 Installation — Isaac Sim Documentation
There is a note that says
“Note
For this course, we use the Running Native ROS method on Ubuntu. Follow the instructions under: Running Native ROS > ROS 2 > Ubuntu 22.04 > Humble.”
I tried to follow the documentation provided to install it on windows but I aways run into roadblocks.
I went into Windows (binary) — ROS 2 Documentation: Humble documentation
The first requirement is for me to install Chocolatey Software | Installing Chocolatey
I tried to follow the documentation (opened a command prompt as admin and pasted the command Get-ExecutionPolicy as instructed.
Then I get this message: Get-ExecutionPolicy’ is not recognized as an internal or external command,
operable program or batch file.
And then I get stuck from here because I’m not able to install not even the first.
Then I downloaded ROS2 for windows. I tried to run C:\ros2-windows>local_setup.bat or C:\ros2-windows>setup.bat commands for environment setup but I get this error:
“[rti_connext_dds_cmake_module][warning] RTI Connext DDS environment script not found (\resource\scripts\rtisetenv_x64Win64VS2017.bat). RTI Connext DDS will not be available at runtime, unless you already configured PATH manually.”
I tried to run ros2 run demo_nodes_cpp talker but got “failed to create process.”
And tried to run ros2 run demo_nodes_py listener and got the same error.
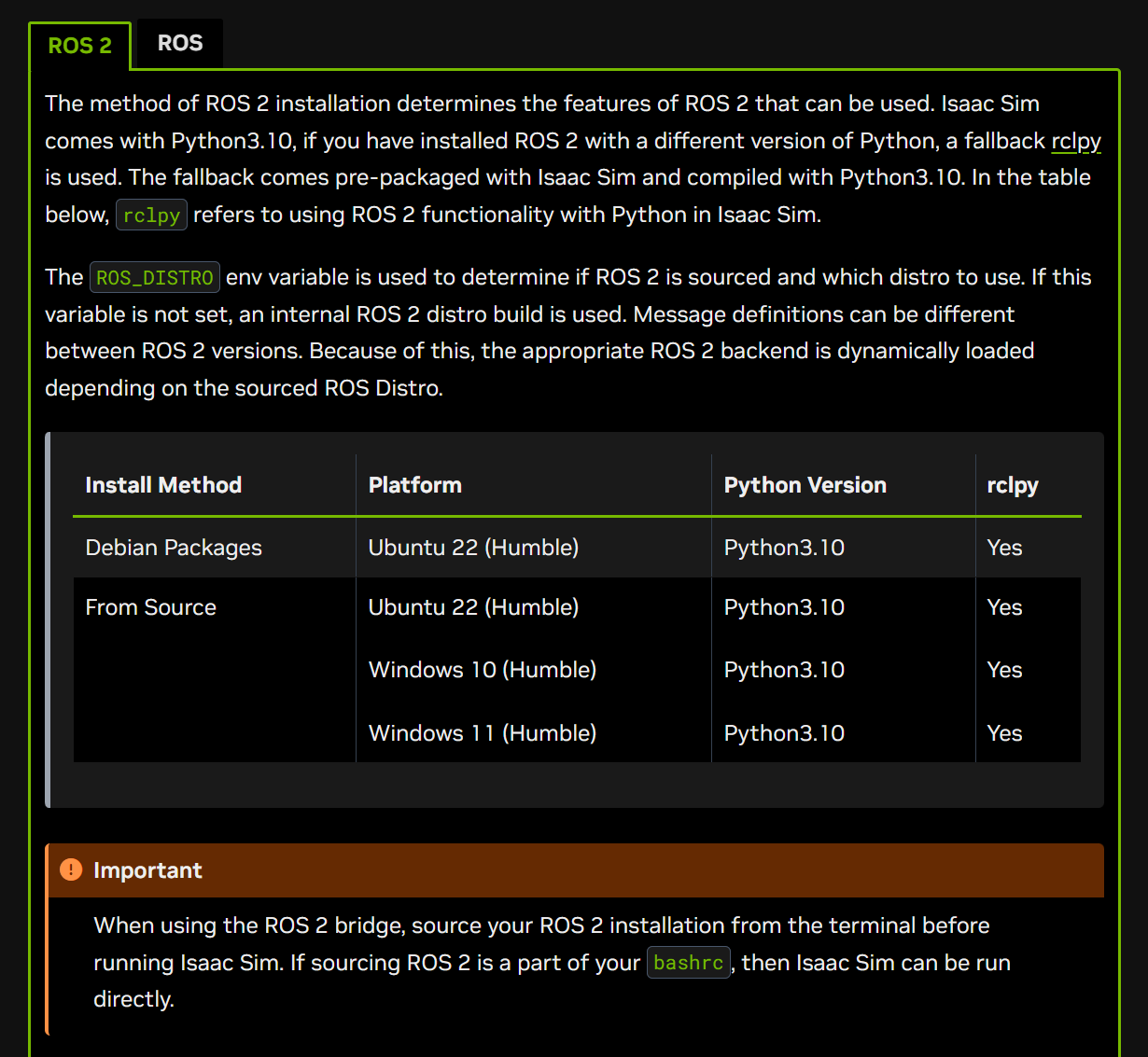
Nothing there explains me how to install ROS2 Humble. The first paragraph talks about how features are determined and how a fallback works if a wrong version of python is installed. The second paragraph talks about the ROS_DISTRO variable and what it does. The table whos which install methods to be used per platform and python version. None of those tells me how to actually perform the installation.
Hi @VickNV
I saw you got this to work in this post:
I will specify my circumstances: Isaac Sim Version 4.5.0
Operating System Windows Server 2025
I did a fresh install of isaac sim in C:\Shared\NVIDIA\Omniverse\isaacsim
Also, I installed ros2 sucessfully on ubuntu 22.04 (WSL2). After sourcing it, i see /parameter_events and /rosout confirming its up and running.
Of course I also setup port forwarding in Powershell for the specific ports used by default DDS (FastDDS) in ROS (like the documentation specified) and confirmed its working like so:
Listen in WSL2: nc -l -p 7400
Connect from windows: Test-NetConnection 172.22.0.153 -Port 7400
I can visually confirm from inside the extension panel in isaac sim that ROS2 Bridge is enabled.
Because you posted this:
ROS2 isnt part of my bashrc and I source every time before running Isaac Sim, as I am currently just trying to get it to work. I also always give it the relevant ROS_DOMAIN_ID and FASTRTPS_DEFAULT_PROFILES_FILE like so
When I publish something in isaac sim and start the simulation, I still cant see any new topic other than /parameter_events and /rosout through ros2 topic list
I invested some more time in this and tried to set it up on a Laptop with Windows 11 Home. I got it (the lidar example from " Getting Started: Simulating Your First Robot in Isaac Sim") to work first try.
As mentioned somewhere before, the wsl networking settings can be left on NAT (default) for what the tutorials try to accomplisch with the simple robot and so on.
I experimented a little bit with wsl networking settings and when setting it to mirrored in .wslconfig,
ros2 topic list
just runs indeffinatly and doesnt show any topic. I saw people recommending that in other forums.
On Windows Server (at least not on 2025 in the current version), there is no mirrored. If one sets it in the .wslconfig file, it throws an error and reverts to NAT. I tried using bridged mode, but since I am not the network administrator and my IT department is not that flexible, I cant get an IP over DHCP. This might not be an issue in a home environment.
Anyways, just wanted to share my experiences, in case other people run into similar issues.
Update
After doing further investigation, i found the core issue (at least for me). On the laptop, when installing Isaac Sim, the process automatically created two firewall (inbound) rules"NVIDIA Omniverse Kit". One allowing UDP for C:\isaacsim\kit\kit.exe and one allowing TCP for C:\isaacsim\kit\kit.exe
After creating these rules on Microsoft Server 2025 it worked.
To whom it may concern: If you have trouble getting to work Isaac Sim on Windows host and ROS2 on WSL, give this a shot.