Isaac Sim Version
[√] 4.5.0
4.2.0
4.1.0
4.0.0
4.5.0
2023.1.1
2023.1.0-hotfix.1
Other (please specify):
Isaac Lab Version
[√] 2.1.0
Operating System
[√] Ubuntu 22.04
Ubuntu 20.04
Windows 11
Windows 10
Other (please specify):
GPU Information
- Model: RTX2080Ti, CUDA version:12.2
- Driver Version:535.230.02
Topic Description
Detailed Description
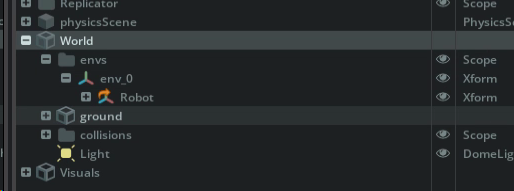
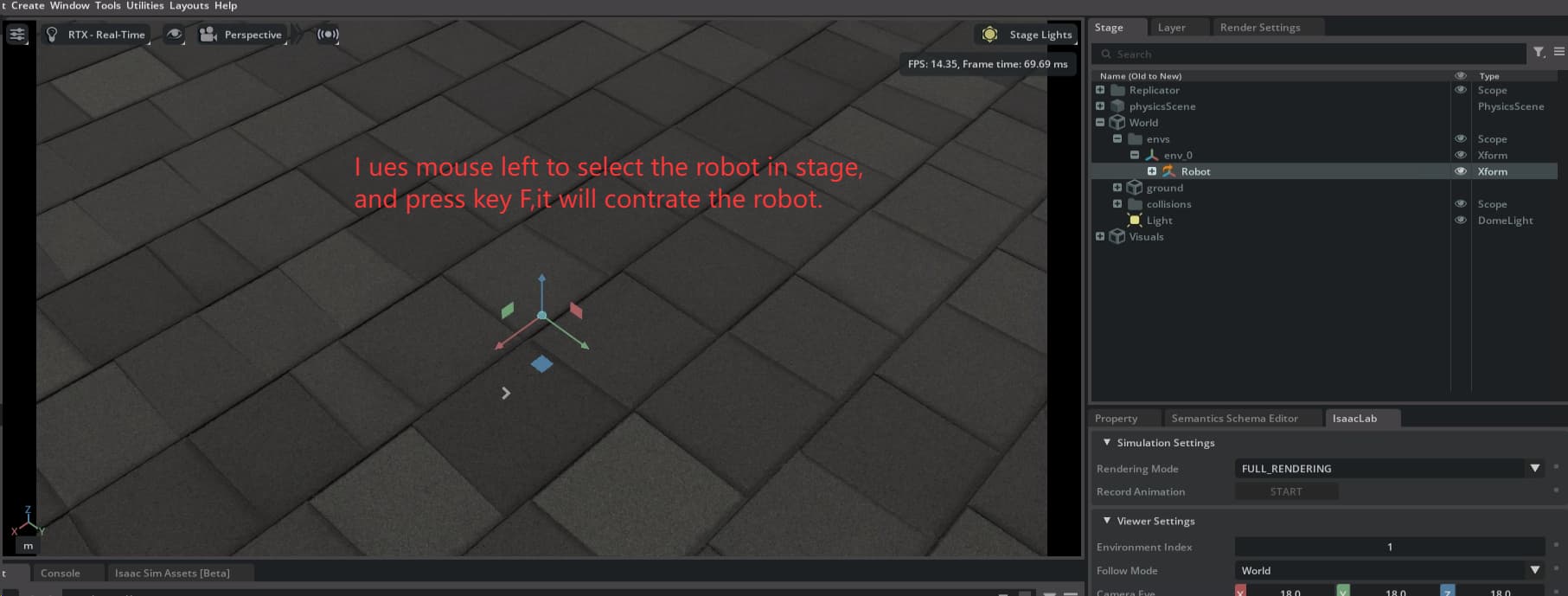
In my environment, I can’t see my drone, even though I clearly added it to the stage. You can check my specific settings and console.However, I believe my code is running normally. The code can train correctly, and it’s effective training, because I mapped the aircraft’s coordinates into a small marker so I can see its trajectory. But I can’t see my aircraft’s attitude/orientation.
Steps to Reproduce
some code :
class CrazyFlieEnvCfg(DirectRLEnvCfg):
robot: ArticulationCfg = CRAZYFLIE_CFG.replace(prim_path="/World/envs/env_.*/Robot")
**following in _setup_scence**
self._robot = Articulation(self.cfg.robot)
self.scene.articulations["robot"] = self._robot
(Add more steps as needed)
Error Messages
Next is console output:
2025-07-20 15:59:59 [Warning] [omni.kit.app.plugin] No crash reporter present, dumps uploading isn’t available.
2025-07-20 15:59:59 [Warning] [omni.ext.plugin] [ext: rendering_modes] Extensions config ‘extension.toml’ doesn’t exist ‘/home/lab317/IsaacLab/apps/rendering_modes’ or ‘/home/lab317/IsaacLab/apps/rendering_modes/config’
2025-07-20 15:59:59 [Warning] [gpu.foundation.plugin] IOMMU is enabled.
2025-07-20 15:59:59 [Warning] [omni.log] Source: omni.hydra was already registered.
2025-07-20 15:59:59 [Warning] [omni.isaac.dynamic_control] omni.isaac.dynamic_control is deprecated as of Isaac Sim 4.5. No action is needed from end-users.
2025-07-20 15:59:59 [Warning] [omni.replicator.core.scripts.extension] No material configuration file, adding configuration to material settings directly.
2025-07-20 15:59:59 [Warning] [omni.kit.menu.utils.app_menu] add_menu_items: menu [<MenuItemDescription name:‘New’>, <MenuItemDescription name:‘Open’>, <MenuItemDescription name:‘Re-open with New Edit Layer’>, <MenuItemDescription name:‘Save’>, <MenuItemDescription name:‘Save With Options’>, <MenuItemDescription name:‘Save As…’>, <MenuItemDescription name:‘Save Flattened As…’>, <MenuItemDescription name:‘Add Reference’>, <MenuItemDescription name:‘Add Payload’>, <MenuItemDescription name:‘Exit’>] cannot change delegate
2025-07-20 16:00:03 [Warning] [rtx.scenedb.plugin] SceneDbContext : TLAS limit buffer size 8287597056
2025-07-20 16:00:03 [Warning] [rtx.scenedb.plugin] SceneDbContext : TLAS limit : valid false, within: false
2025-07-20 16:00:03 [Warning] [rtx.scenedb.plugin] SceneDbContext : TLAS limit : decrement: 167690, decrement size: 8204721408
2025-07-20 16:00:03 [Warning] [rtx.scenedb.plugin] SceneDbContext : New limit 8682532 (slope: 494, intercept: 3699200)
2025-07-20 16:00:03 [Warning] [rtx.scenedb.plugin] SceneDbContext : TLAS limit buffer size 4291087616
2025-07-20 16:00:03 [Warning] [rtx.scenedb.plugin] SceneDbContext : TLAS limit : valid true, within: true
2025-07-20 16:00:03 [Warning] [omni.usd-abi.plugin] No setting was found for ‘/rtx-defaults-transient/meshlights/forceDisable’
2025-07-20 16:01:05 [Warning] [omni.hydra.scene_delegate.plugin] Calling getBypassRenderSkelMeshProcessing for prim /Visuals/Command/goal_position.proto0_mesh_id0 that has not been populated