I am using Isaac Gym and setup.py says it is version 1.0.preview4. I am wondering how to enforce self-collisions for the Franka robot?
In particular, I am running the Franka OSC example from isaacgym/python/examples/franka_osc.py and if I change the way that the Franka hand moves, I observe that self-collisions are not enforced correctly. One way to do this is to change this:
# Set desired hand positions
if args.pos_control:
pos_des[:, 0] = init_pos[:, 0] - 0.1
pos_des[:, 1] = math.sin(itr / 50) * 0.2
pos_des[:, 2] = init_pos[:, 2] + math.cos(itr / 50) * 0.2
To this, where instead of subtracting 0.1, I subtract 0.5:
# Set desired hand positions
if args.pos_control:
pos_des[:, 0] = init_pos[:, 0] - 0.5
pos_des[:, 1] = math.sin(itr / 50) * 0.2
pos_des[:, 2] = init_pos[:, 2] + math.cos(itr / 50) * 0.2
This results in a video that looks like this:

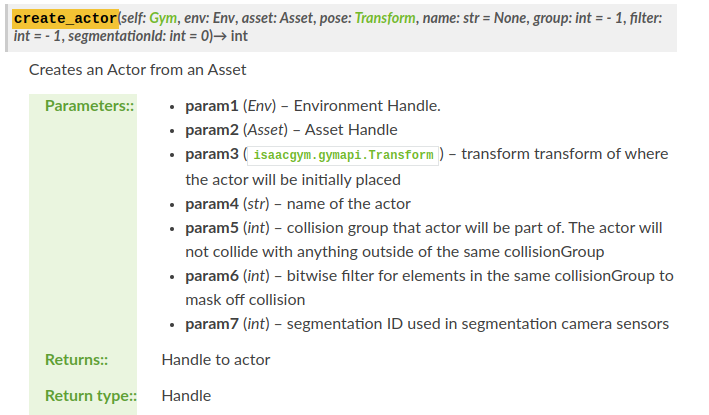
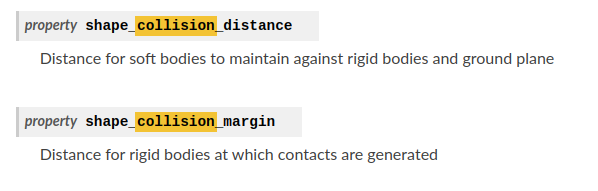
Which shows that the Franka gripper is intersecting with other links of the Franka. I am curious if there is a way to fix this? For example do I have to adjust some simulation parameters like this in the docs?
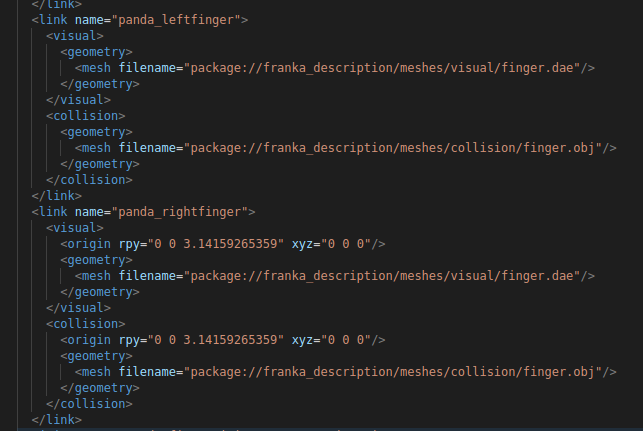
Or is there a way to fix this with the URDF file of the Franka? But the Franka URDF shows, for example, that panda_leftfinger and panda_rightfinger already have collision geometries with <collision> ... </collision> there.