Hi everyone. I’m trying to simulate a custom drone designed in Onshape. For now it’s a very simple design with just a frame, motors and propellers. Eventual goal is to be able to observe how aerodynamics in certain environments affects the drone’s ability to stabilize itself and perform additional tasks. I have a few questions -
Is Isaac Sim the appropriate platform for this kind of application? Or should I be looking at Gazebo instead?
I’m new to both Onshape and Isaac - I’m having trouble importing the simple drone into Isaac Sim -The propellers get detached from the motors. We have set up the mates as required (Onshape Importer Tutorial). I am attaching some screenshots and the log file below. I would really appreciate any insight into why this might be happening.
Additionally, I have tried to find more documentation (apart from the one mentioned above) for the Onshape Importer but haven’t been able to find any. If anyone has come across any additional documentation, please do share.
Are there any examples from the Isaac Sim team for drones? I have looked into Pegasus and Omni Drones and both are great, I was just wondering if there were Isaac Sim examples for drones like there are for other robotic platforms (manipulators, wheeled and quadruped ground robots etc).
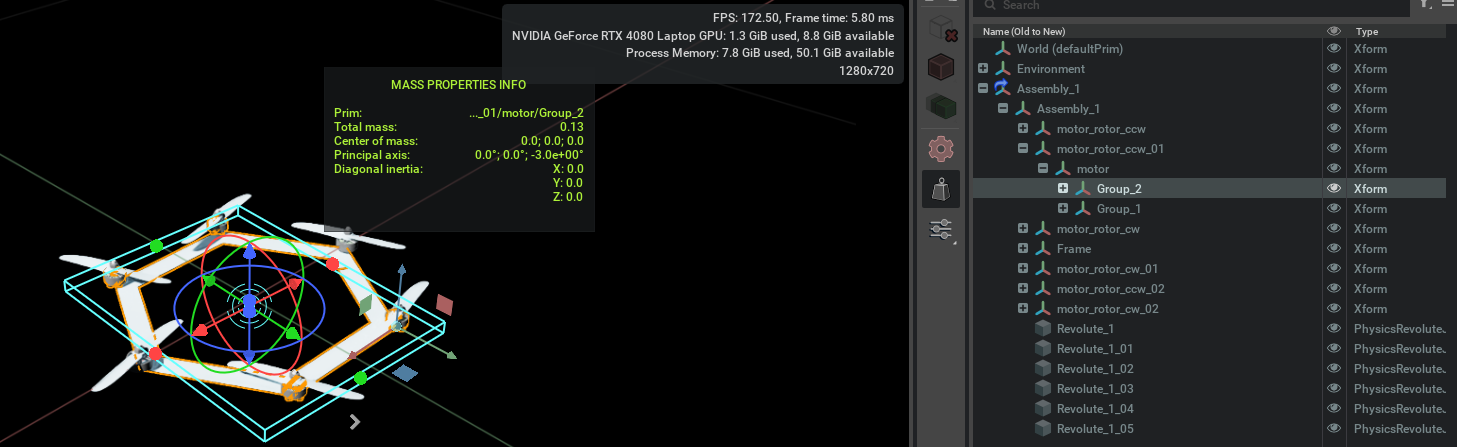
Hi @rgasoto thank you for your response! We checked the mate ordering and verified it is correct, but the issue persists. I also wanted to add that the use of a configuration to express CW or CCW motor subassembly variants seems to cause the problem - when we model these configurations as separate assemblies the import works and all propellers are attached except for one anomaly - the frame is not imported as the frame, when I click on the frame in the k tree, a motor and propeller pair is highlighted instead of the frame. (Screenshots attached)
Are configurations supported for sub assemblies (i.e. one tier below the top)? If so, how do we get them to work? Could you also perhaps point us to the source code of the Onshape Importer Extension? It might give us hints about what could be going wrong.
Yes group mates are used in all three levels of the assembly tree.
Is there a limitation to the amount of fastened mates we can use? From the docs it seemed that either would be fine, and the group mates were a suggested simplification option.