Isaac Sim Version: 4.5.0
GPU Information
- Model: Nvidia GeForce RTX 4080 (ROG Zephyrus G16 2024 version)
- Driver Version: 575.64.83
Topic Description
When publishing ROS2 Clock from the omnigraph graph nodes ( ROS2 Clock — Isaac Sim Documentation ), there will always be a duplicated timestamp regardless whether the publisher is reading from Isaac Read Simulation Time or Isaac Read System time.
ros2 topic echo /imu | grep -A2 ‘stamp:’
stamp:
sec: 1755769182
nanosec: 309157376
stamp:
sec: 1755769182
nanosec: 309157376
stamp:
sec: 1755769182
nanosec: 445158400
stamp:
sec: 1755769182
nanosec: 445158400
stamp:
sec: 1755769182
nanosec: 581232384
stamp:
sec: 1755769182
nanosec: 581232384
Detailed Description
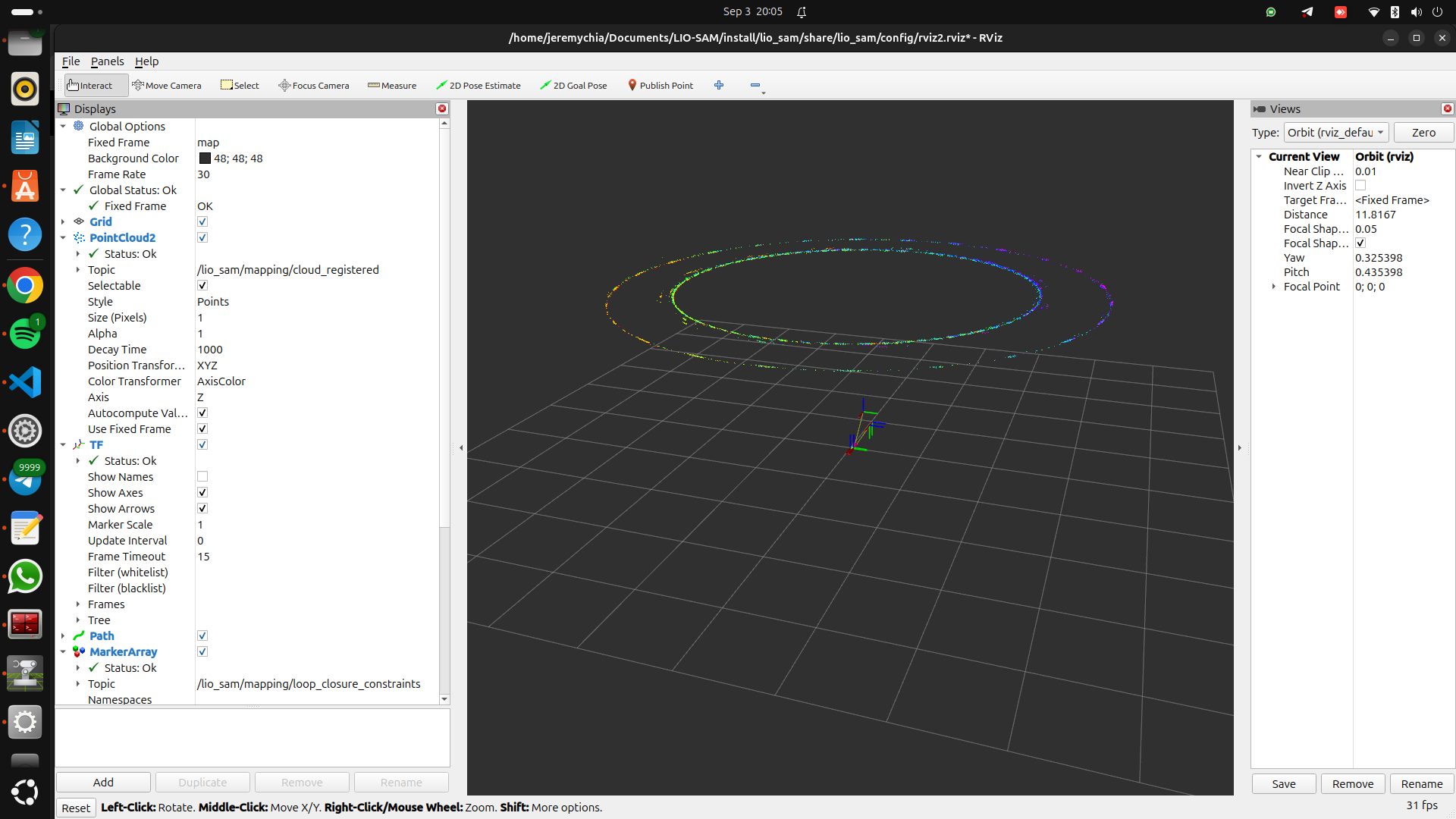
I am trying to use perform LIO-SAM using the 3D Lidar (OS0_REV6_128_10hz___512_resolution) sensor from isaac sim’s json configuration. However, due to the duplicated timestamp that is being published from isaac sim, i am constantly getting a integrateMeasurement error of dt <= 0. I am unable to localise LIO-SAM properly and experience hallucination in rviz2. A paragraph of the error and a video can be seen below:
[lio_sam_featureExtraction-4] [INFO] [1755769350.121818987] [rclcpp]: ----> Feature Extraction Started.
[lio_sam_imageProjection-3] [INFO] [1755769350.132582331] [rclcpp]: ----> Image Projection Started.
[lio_sam_imuPreintegration-2] [INFO] [1755769350.145099592] [rclcpp]: ----> IMU Preintegration Started.
[lio_sam_mapOptimization-5] [INFO] [1755769350.185142682] [rclcpp]: ----> Map Optimization Started.
[lio_sam_imageProjection-3] [WARN] [1755769350.980040117] [lio_sam_imageProjection]: Point cloud timestamp not available, deskew function disabled, system will drift significantly!
[rviz2-6] [INFO] [1755769351.238057009] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-6] [INFO] [1755769351.238296440] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[rviz2-6] [INFO] [1755769351.417769841] [rviz2]: Stereo is NOT SUPPORTED
[lio_sam_imuPreintegration-2] terminate called after throwing an instance of ‘std::runtime_error’
[lio_sam_imuPreintegration-2] what(): PreintegratedImuMeasurements::integrateMeasurement: dt <=0
[ERROR] [lio_sam_imuPreintegration-2]: process has died [pid 20548, exit code -6, cmd ‘/home/jeremychia/Documents/sam2/LIO-SAM/install/lio_sam/lib/lio_sam/lio_sam_imuPreintegration --ros-args -r __node:=lio_sam_imuPreintegration --params-file /home/jeremychia/Documents/sam2/LIO-SAM/install/lio_sam/share/lio_sam/config/params.yaml’].
[lio_sam_mapOptimization-5] [WARN] [1755769392.540863792] [lio_sam_mapOptimization]: Not enough features! Only 8 edge and 511 planar features available.
[lio_sam_mapOptimization-5] [WARN] [1755769522.849107708] [lio_sam_mapOptimization]: Not enough features! Only 10 edge and 511 planar features available.
[lio_sam_mapOptimization-5] [WARN] [1755769578.060632879] [lio_sam_mapOptimization]: Not enough features! Only 10 edge and 512 planar features available.
[lio_sam_mapOptimization-5] [WARN] [1755769682.432389300] [lio_sam_mapOptimization]: Not enough features! Only 7 edge and 443 planar features available.
[lio_sam_mapOptimization-5] [WARN] [1755769686.041505307] [lio_sam_mapOptimization]: Not enough features! Only 7 edge and 444 planar features available.
Additional Information
What I’ve Tried
Also to simulate the point_cloud_rings (as LIO-SAM requires it, and isaac sim lidars do not come with pcd rings), I am also using this pcd coverter from this repo: GitHub - REGATTE/isaac_sim_pointcloud_full_publisher: Publish full PCD Data for isaac sim .